

HydroSMAC Daily Log
Day 10: Desperation Dive
10/10/2019
By Sandra Brooke
We woke up on our last dive day to heaving seas and white-caps. With a strong current to boot, the ROV crew decided not to risk the vehicle by diving under these conditions. The winds were worse to the north and the currents were worse to the south. To the west was the deep abyssal plain, so that left east. We were also time-limited as we had a 16-hour steam into St Petersburg and had to be there early for a science crew change. We often have to deal with these conundrums at sea. Ship and vehicle time is very expensive so we need to wrangle as much science as possible from our limited time out here. To that end, we pulled up the multibeam bathymetry, together with the wind and current models to try and find a ‘sweet spot’ to deploy the ROV. We found a hint of something on a single line of multibeam in the right depth zone (~500 m) for the deep-sea reef-building coral, Lophelia pertusa. We decided to head over there and have a look at our ‘desperation’ dive site. As we reached the site, anticipation rose – would we discover a new Lophelia reef, or a gorgonian ‘coral garden’? As we arrived on station, the winds and currents had not abated, but we ran the bottom sounder anyway to see if we could see any indication of a coral reef. After the third trackline with no sign of anything interesting, we finally gave up and started our bumpy transit into St Petersburg.
All this effort gave us nothing useful; but it could have come out differently. Exploration and discovery is driven by an insatiable curiosity about our natural world, and the stubborn will to keep going in the face of adversity. There are many failures for every success. So we will leave the seafloor in peace for now and go back to port, where we will switch crews and start all over again.

Day 9: Dead Coral Waterfalls
10/9/2019
By Sandra Brooke
Today’s dive started at 2250 meters on a steep wall. The scenery was spectacular, but the most striking initial observation were the piles of coral skeletons filling the ravines in the wall and creating ‘dead coral waterfalls’. Seeing dead skeletons at the base of a steep slope is not unusual; when the corals die or lose their hold on the substrate, gravity takes them down to accumulate at the bottom. However, seeing this many corals for what seems like endless distance up the ravines was rather surprising - and tantalizing as this many skeletons indicated a rich coral community somewhere up the wall.

As we continued up the slope, the number and type of corals increased until the entire wall seemed occupied. Many of the colonies were over a meter across, but the most amazing sight was a single branched bamboo coral that was visible on the ROV sonar. It projected directly out of the wall and measured over 3 m in length. While this was the largest of these corals we saw, there were plenty of others that seemed almost as large.
Another unexpected sight was a pink bubblegum coral colony, almost subsumed by orange zoanthids. These small anemone-like animals are often seen overgrowing bubblegum corals in Hawaii, but we have never seen such a thing here in the Atlantic. It will be interesting to see whether these zoanthids are related to the Hawaiian species.

Day 8: Why Do We Sample?
10/8/2019
By Amy Baco-Taylor
On deep-sea exploration cruises, we collect many hours of ROV or submersible video that includes observations of many deep-sea corals. To be able to determine what species we are seeing in the videos, we also collect voucher specimens. Collection of voucher specimens is particularly important for deep-sea corals, because many of the morphological characters used to assign species identifications require viewing the polyps and their sclerites under a dissecting microscope and a scanning electron microscope.
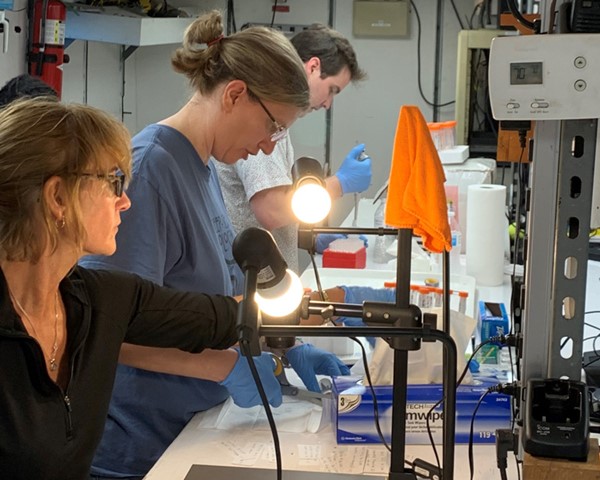
The morphological taxonomy of corals is challenging because many families of deep-sea corals need major revisions. So to get a better handle on which species we have we will use DNA barcoding. DNA barcoding is a process by which the same section of DNA is sequenced for every individual, and the sequences can be compared to each other to determine how many species we have. We can also compare these data to online public databases like GenBank, to help us to identify which species we have.

The naming process and video counting come in the months after the cruise. While we are in the field viewing and collecting specimens, even if we don’t have names for those species yet, we can often tell coral families apart by gross colony morphology including color, branching patterns, polyp sizes, or other characters that are easy to see through the ROV video. So we can put individual colonies into a family pretty easily. Within the family there are also variations in branching patterns, color or other morphological characteristics that help us to tell species apart, so we often can tell that we have a few different species within a family as well. On this cruise we are generally collecting 1 individual of each species we see, with a focus on the dominant species. Because we are exploring deeper depths than others have explored in the Gulf, we also anticipated a lot of new species or new depth records for known species, so we also collect anything that might be new. On this cruise we think we have collected at least 10 new species!
Day 7: First Time At Sea
10/7/2019
By Anthony Sogluizzo, FSU Graduate Student
I have been working with deep water corals for about 4 years in Dr. Brooke’s lab. During that time span she has gone on 8 research trips and each time has come back with coral samples for me to process. I worked on the samples diligently but always wanted to be brought along for the experience of going out to sea. Finally, Dr. Brooke had a spot available for me on the HydroSMAC trip and I’ve had a fantastic time. Getting to experience the process of collecting coral with the ROV and the subsequent initial processing was interesting and enlightening. Nothing has been more exciting than having a presence 2000 m below the surface of the ocean.

More important than getting to the deep ocean was the coordination between 6 different groups acting together to make the plan come to fruition. The FSU coral and meiofauna groups, the NOAA modelers, the FAMU ocean physicists, ROV pilots, and ship’s crew all worked in concert to make and execute a plan.
The crew staffing the Research Vessel Point Sur were fantastic and every accommodation a visiting scientist could want was available. The crew also allowed myself and other researchers to help with ROV deployment and retrieval and get a feel for how the ship operates. Oh, and the food was fantastic!
Day 6: The Wall
10/6/2019
By Travis Kolbe, Global Explorer ROV Superintendent
Work with me here… Close your eyes real tight, and try to imagine being in an enclosed space with 6 bright monitors facing you with nothing but a sandy, rocky bottom, and blackness off in the distance on the screen that’s in front of you. You’re searching, just searching for something special to make the dive, or even the day, worth the effort taken to get to this spot. You search the sonar which is in the right top hand monitor looking at the colors presenting themselves, bright and dark orange colors, black’s and blue’s all taunting you saying “you’ll never find it”.
“Come up on the winch three wraps” you call out to the winch operator, shortly followed by “captain can we move the ship 20 meters at a heading of 090” in hopes that you move the vessel and clump weight, that connect the ROV to the vessel, in the right direction but not having that road map that shows you were to go, it’s all a gamble and hoping that gamble pays off. But as you make a couple more moves and a couple more “up on the winch three wraps” you notice something on that sonar monitor. IT’S HOPE. It shows you hope in the form of solid colors indicating something very hard in structure is just ahead.
“Captain, can we move at a heading of 090, 30 more meters”. As you creep up to the contact on the sonar, images on the monitor in front of you change from slightly sandy, ash tone rock, to a shear black wall going straight up and IT’S NOT WITHOUT LIFE...

Many different types of corals and sponges fight for space on a steep rocky wall. Brooke et al 2019, NOAA OER and ROV Global Explorer
Images of beautiful coral emerge, white stony looking coral, beautiful orange and yellow coral also but it’s not primarily one species IT’S A WHOLE COMMUNITY. It’s amazing for someone that has been diving ROV’s for over 24 years to see anything like this in the Gulf of Mexico, I am just awe struck. I lose all form of social etiquette and blurt out “holy”… Well you get it.
This wall is 17 meters high, filled with all sorts of specimens and animals and it just shows you how much life really is at 1900 meters below the surface of the water. In all my time with Remotely Operated Vehicles I never thought, in my life I would see a vision like this and very few people ever have. But the hope is that others will come back and to see this wonder of nature and experience it for themselves as well. But for now we will descend the depths, trading brilliant colors and the community of animals for the blackness and particles of the water column as we return the surface to put the ROV away for the day. Knowing beauty is just a mile away. . But straight down!!
Day 5: How to Find Deep-Sea Corals
10/5/2019
By Arliss Winship and Matt Poti, NOAA National Centers for Coastal Ocean Science
Looking out across the vast sea from the deck of our ship it seems a rather impossible task to locate deep sea corals that live hundreds or thousands of meters beneath the surface. It is expensive and takes a lot of time and effort to send remotely operated vehicles (ROVs) and other devices down to the seafloor to view and sample corals. Corals only live in particular conditions so it would be costly and highly inefficient to conduct a random search. Fortunately through past surveys we now know some of the key characteristics of deep sea coral habitat which allows for more efficient searching.
Species of deep-sea corals tend to be found at specific depth ranges often where the seafloor is sloped and composed of exposed rock. Large datasets that describe ocean depth or bathymetry are available from surveys that use multibeam sonar to map the seafloor (e.g., NOAA Okeanos Explorer expeditions). From these bathymetry datasets it is straightforward to calculate the slope of the seafloor. Furthermore, backscatter information from these sonar surveys can provide a measure of the hardness of the seafloor indicating exposed rock. Armed with this information we can target areas where deep-sea corals are more likely to be found.
An additional tool for identifying potential deep-sea coral habitat is predictive modeling. These models predict likely deep-sea coral habitat by relating observed occurrences of deep-sea corals to multiple environmental variables like depth and slope but also oceanographic variables like water current speed near the seafloor. NOAA NCCOS has developed predictive models for deep-sea corals in US waters of the Gulf of Mexico from known occurrences and is currently developing updated models for the Bureau of Ocean Energy Management (BOEM) that incorporate absence data.
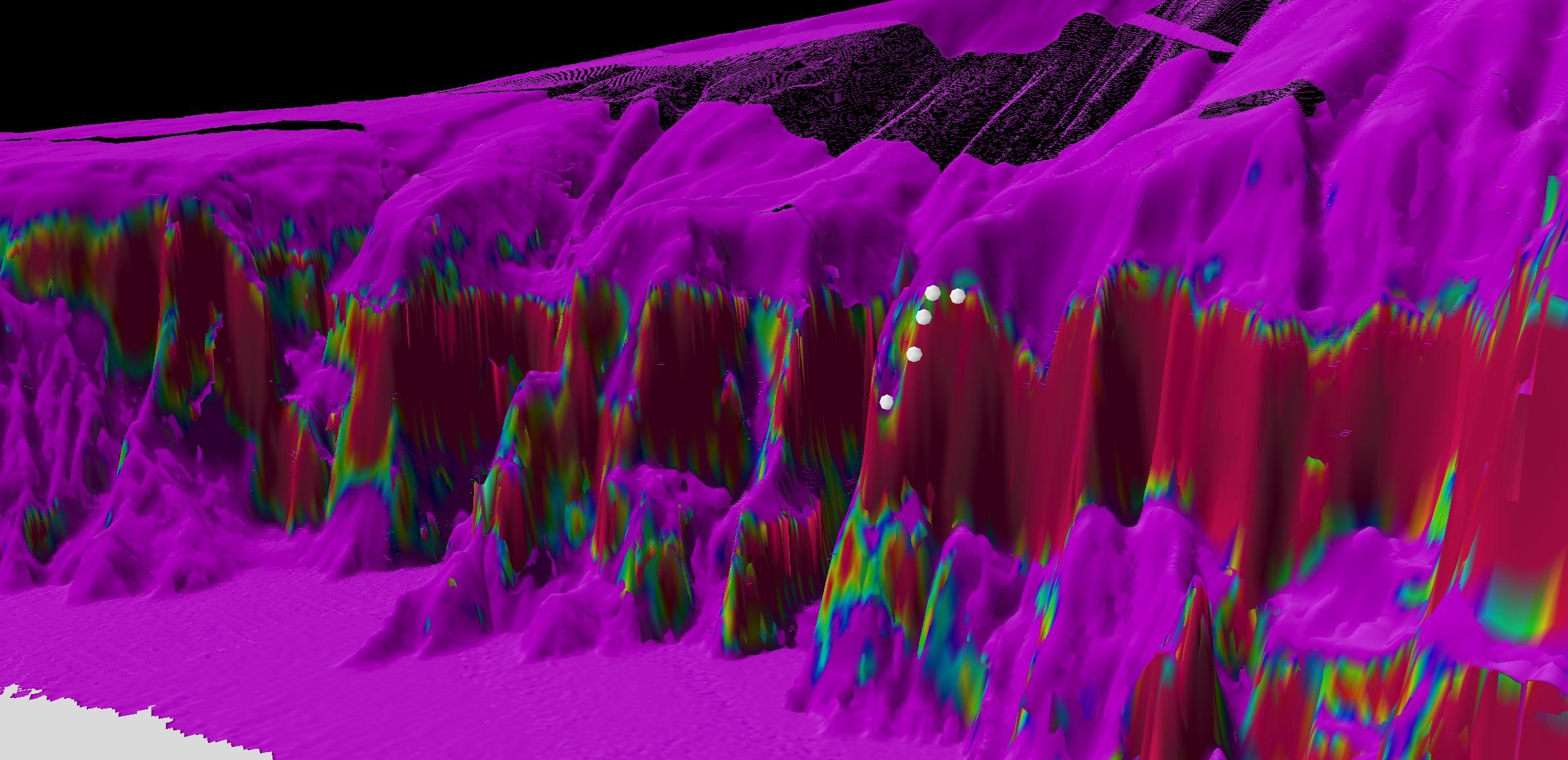
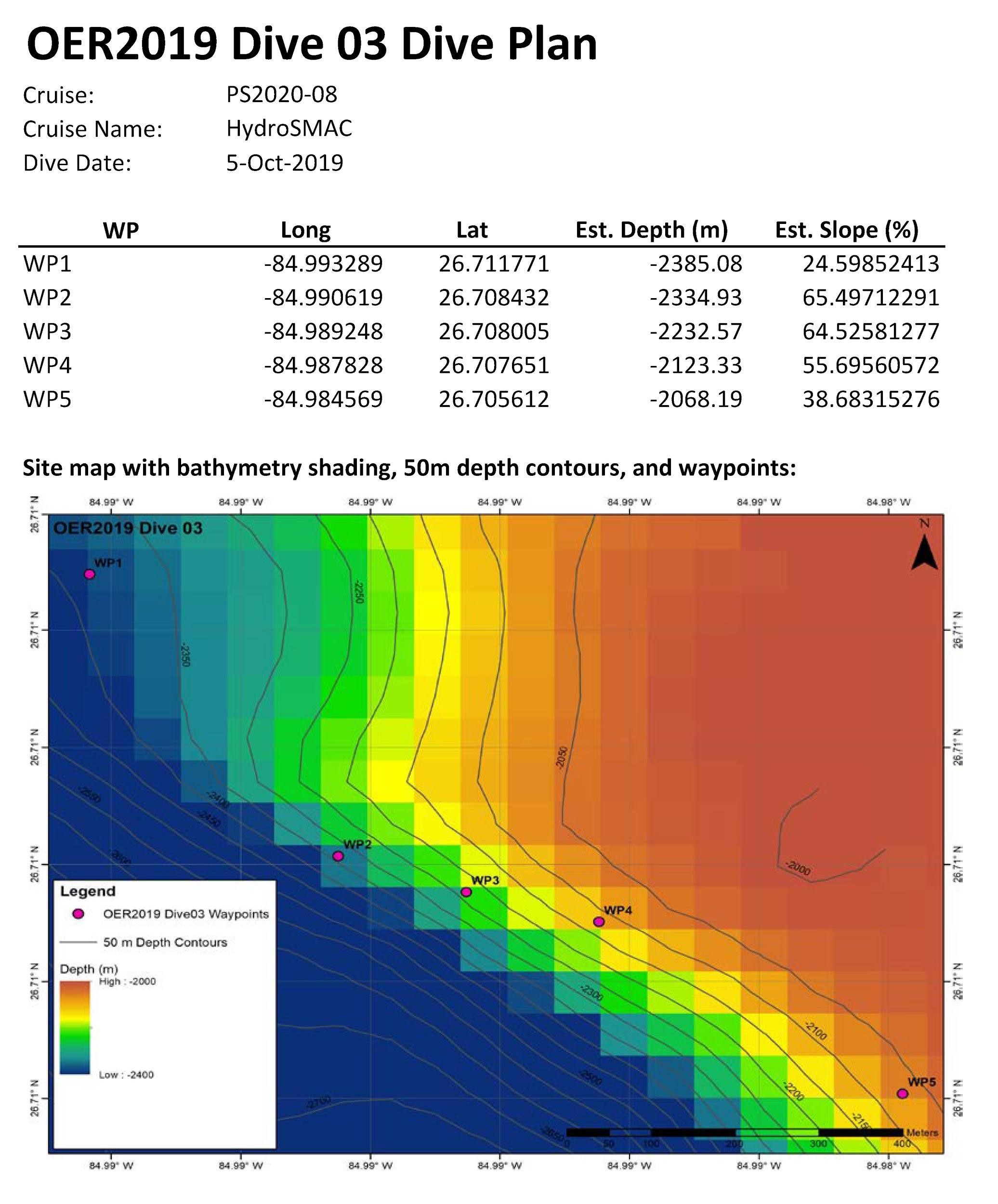
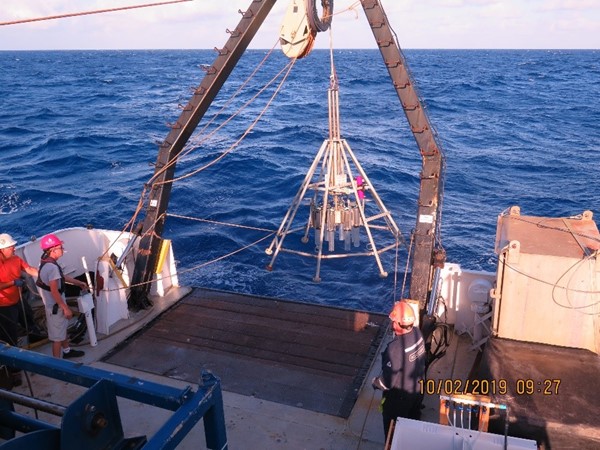
When planning our ROV dives we use specialized software to visualize and map all of the aforementioned information (Figure 1). We then identify areas of the seafloor with the right combination of habitat characteristics and areas where the models predict suitable deep-sea coral habitat. The coordinates of the target sites are passed along to the ship’s crew and the ROV team and away we go (Figure 2).
Despite the careful planning that goes into choosing dive sites it is never certain that we will find deep-sea corals where we think they should be. As the ROV descends through the dark depths of the ocean we crowd around the monitor in anticipation of what we will find at the bottom. There is always excitement when we do find deep-sea corals, but even when we do not that information is extremely valuable for refining our understanding of deep-sea coral habitat and improving our predictive models.
Day 4: Corals, Corals Everywhere
October 4, 2019
By Sandra Brooke
Today we dived on an unexplored site that was predicted to have moderate to high currents, but low likelihood of corals, based on the existing models (which are data-limited at depths greater than 1000 m). We landed on a fairly flat rocky pavement with scattered colonies of a yellow gorgonian (Paramuricea sp), each with a brittlestar wrapped around its branches. Large bamboo coral colonies were visible in the background, enticing us to go further into the rugged habitat beyond the ROV lights.

As we moved towards the steep wall visible on the ROV sonar, we saw large dead coral skeletons littering the seafloor. This is common at the base of an escarpment as corals die and fall off the substrate, or get so large that gravity overcomes their hold on the wall. We stopped to collect a coral and discovered the ROV manipulator arm had decided not to work that day. While this was disappointing, the upside was we could explore more territory, so we sat back and enjoyed the ride – and what a ride it was! The landscape was awesome, with massive boulders and sheer cliff faces covered in a dizzying type of corals and sponges.

It looked like Dr. Zeuss’ playground, with colonies of all shapes, sizes and colors, many of which we cannot identify to species. We ended the dive on huge steep pinnacle covered in corals and sponges of every description. This dive was truly magical!
Day 3: Splash!
October 3, 2019
By Sandra Brooke
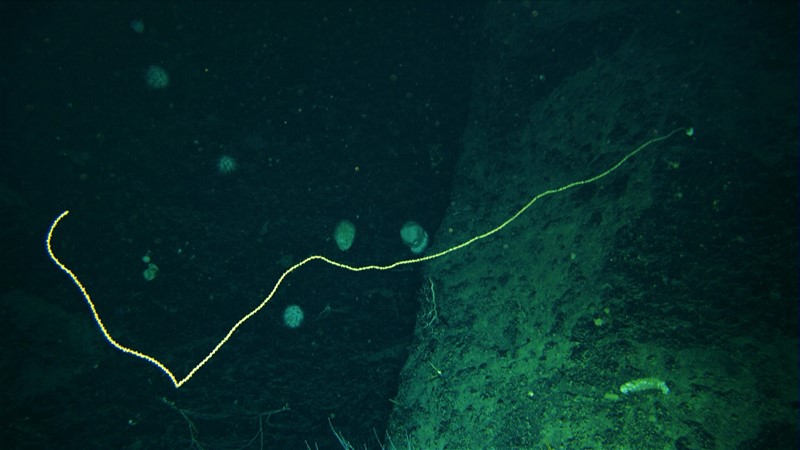
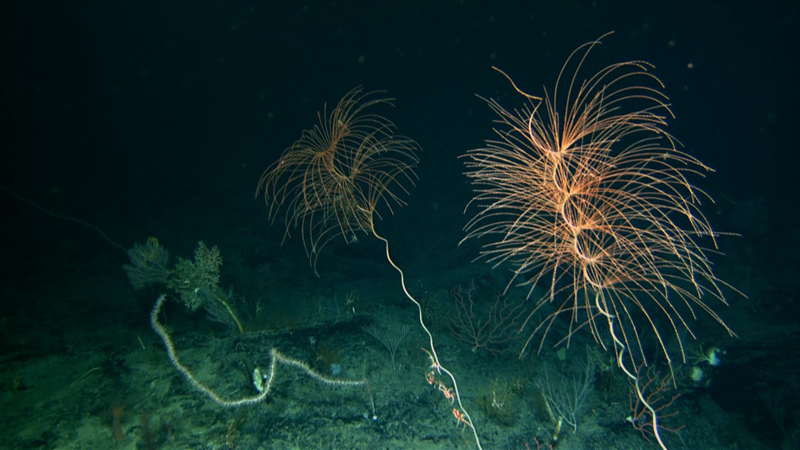
The weather yesterday was too rough for ROV operations and today was forecast to be more of the same at our first dive site, so we decided to try and dodge the weather by heading north where the forecast was slightly better. We used NOAA multibeam bathymetry to select a nice steep site on the escarpment and set off on an overnight steam to our new site. As it turns out, our gamble paid off! While still marginal, the ROV team decided the weather conditions were sufficiently safe to try a dive. After a ballast check to make sure the vehicle would fly correctly, we were in the water. Nobody had explored this site before so we didn’t know what we would find, if anything. What we found was giant boulders and sheer cliff faces scattered with colonies of spiraling coral (Iridogorgia), bubblegum coral (Paragorgia), and a range selection of bamboo corals, some of which had branches so fine they were almost invisible.

Hexactinellid (glass) sponges displayed their usual bizarre morphology and looked almost iridescent in the ROV lights. Towards the end of the dive we had a selection of coral samples but were still missing the sediment cores. We came across a very steep slope of sediment, which looked impossible to sample but never daunted, the Global Explorer pilots decided to give it a try. Three ‘on the fly’ push cores later, it was time to leave bottom. The ROV surfaced to a gorgeous sunset after a fantastic first dive!

Day 2: Waiting on Weather, and Multicore Growing Pains
October 2, 2019
By Jeroen Ingels
Yesterday was a 24 hour grind through rough seas and the ship was haunted by ghostly greenish scientists trying not to lose their lunch. Today was marginally better but too rough to launch the ROV. We decided instead to deploy the multicore to collect sediment samples; at least the mud people would be happy. Indeed they were, and action packed evening awaited, but not in the sense we had anticipated. Multicoring can be trickier than the relatively simple design of the pyramid-like structure may let you assume. A metal-framed pyramid, with 8 plastic tubes that get pushed into the sediments in the seafloor, accompanied by a clever closing mechanisms which seals off the bottom and top, before we haul it back on deck. We are basically dangling a 500 pound “tipi” off a cable and let it down at 40m/min to wherever we think there is mud! Several things to consider here. Important considerations are the state of the sea and how our ship is behaving on that sea. What we do not want is a 500-pound metal cage slinging about on the aft deck, knocking out scientists and crew like bowling pins, while smashing itself to smithereens against the A-frame, which is significantly more robust than the multicorer itself. That would result in a very short research cruise indeed. The sea state (wave height, swell, etc.) also effects the way in which the corer behaves in the water. The winch is equipped with a tension meter that tells us how much pull is on the cable. This can be significantly increased and decreased through the heaving of the ship in rougher seas, creating a ‘yoyo’ effect with low tension when the aft is low and high tension when the aft is high… the greater the heave, the more we risk 1) tugging the cable beyond its strength, and 2) entangling the cable around the corer, leading to it either hanging upside down/sideways, or breaking the frame or coring unit. Broken or upside down corers do not bring back deep-sea mud – this has been tested by a number of unfortunate scientists and crew members.
We identified an interesting coring site on the flank of the escarpment near the dive site. At about 2300 m the bathymetry data showed a flat terrace of about a square kilometer. Terraces along steep slopes are usually good places to punch a plastic tube in because they often contain layers of soft sediments – imagine it like being pushing a straw in soft butter; you get the picture. However, sometimes they are covered in debris from avalanche type sediment flows that came down from the flanks of the neighboring walls. During the deployment, we were guided by the USBL, a GPS system that allows us to track the location of the multicorer under water, guiding us to the exact spot on the terrace we had in mind. Bad luck struck, our transponder (the unit attached to the multicorer frame that sends the signal to the beacon hanging off the side of the ship) did not communicate the coordinates deeper than about 1500 m, so beyond that we would literally be going in blind. Fortunately, the multicorer did not move more than 40 m away from the ship during the first 1500m descent, so it seemed safe to lower it further down to 2250 m assuming no drastic current changes and still being able to hit the intended terrace. This was not just down to Neptune or good fortune, but rather the incredible skill of the crew at the steering wheel keeping this ship on exact location without a dynamic positioning system; they manually keep it locked on station…which is impressive to say the least. They know how to handle this boat!
But no luck, the corer came up on deck the same way it left us a couple of hours before, no mud and the closing mechanisms had not been triggered. Also our second and third deployments were not successful. What went wrong, hard bottom seafloor? A steep slope? Did we actually reach the bottom? Normally one would see a drop in the tension meter when the corer hits the seafloor, and the weight is taken of the cable. Such a drop was not visible but can be caused by the weight of 2250m of added cable mass, making the weight difference of a multicorer hitting bottom disappear in the waves of tension caused by the heave of the ship. After inspecting the cable winch, we found out the system that tells us how many meters of cable are being paid out did not work properly, easy fix, but no guarantee another deployment would be successful.
We decided to go to another site, but instead of going shallow, we’re testing a deeper site: -85.500, 27.303. We arrived, got the echo sounder working to establish water depth: 3220m……..hm, how much cable have we got? 3100! 3300! I thought it was 3400! The theoretical answer was supposed to be in the books somewhere but nowhere to be found at this very moment…. But ah, relief… it was written down in an excel sheet: 3400m minus some pieces that we had to cut off since it had been installed…hm. There was a curious enthusiasm looming with some of the scientists and crew to test the actual length of the cable… enthusiasm was accompanied with the stress of paying out all the cable this ship has and not reaching the bottom! That or worse, a miscalculation of how much cable we need to leave on the winch, before we run the risk of the cable slipping off the drum and disappearing entirely into the deep blue. Humor and wry smiles led to the conclusion we have to try. 3186 meters were paid out…our site was 3220 m, aaaah, at least we tried, and now we know how much cable we got… or so we thought. People gathered on deck to haul in the last of the deployments, and secure it for transit to the next dive site overnight. Sleepy faces looked puzzled when there was mud smeared on some of the edges of the tubes… Hang on? We hit bottom with 34m cable short! No actual sediment cores, but mud means bottom! Seems the cable pay out system needed a little more adjusting. End of the day, we are all set for tomorrow’s coring, what could possibly go wrong? (edit: we got massive amounts of mud the next day!)

Day 1
October 1, 2019
By William Brantley
Rough seas made for a rocky start to our adventure, but our spirits couldn't be dampened! While in transit to our first dive location we have been privileged to be accompanied by a variety of inhabitants of the Gulf of Mexico. Playful dolphins enjoyed the wake from the Point Sur. We also managed to catch sight of a sperm whale in the distance, a real treat for our crew full of marine enthusiasts. Our final companion of the day has been a juvenile Brown Boobie, an adorable sea bird that picked off many unsuspecting flying fish throughout the day. We have officially completed day one of our transit and are now looking forward to calmer seas and a glimpse into the deep waters of the Gulf of Mexico.

